> ## Documentation Index
> Fetch the complete documentation index at: https://support.lumafield.com/llms.txt
> Use this file to discover all available pages before exploring further.
# 欢迎来到 Voyager
> Lumafield CT 扫描数据交互平台
概述
Voyager 是 Lumafield 的基于云的软件,用于管理、检查和分析在 [**Neptune**](/zh-Hans/neptune/neptune-intro) 和 [**Triton**](/zh-Hans/triton/triton-intro) 扫描仪上捕获的数据。无论您是 X 射线 CT 新手还是老手,Voyager 都为您提供了组织扫描 Projects、导航重建体积、测量几何形状和运行分析工作流程的工具。
Voyager 包括两个主要组件:
* [**Project 编辑器**](#voyager-project-editor) — 用于 CT 数据的交互式可视化、测量和分析
* [**Dashboards**](#voyager-dashboards) — 用于 Project 组织、Workspace 管理和管理设置
请查看 [Voyager 发行说明](/zh-Hans/platform/voyager-release-notes) 和 [每月亮点](/zh-Hans/platform/monthly-highlights) 了解最新动态——最近的更新包括 [**Voyager 2.0**](/zh-Hans/voyager/voyager-modes) 和 [3D 自动尺寸标注](/zh-Hans/voyager/voyager-auto-dimensioning) 套件。
***
Voyager Project 编辑器
Project 编辑器是 Lumafield 的分析软件,用于直接与 CT 扫描数据进行交互——创建和导航数据、测量几何形状以及运行分析工作流程。布局信息请参阅 [**四处走动**](/zh-Hans/voyager/voyager-getting-around)。

Voyager 模式
自 [Voyager 2.0](/zh-Hans/platform/voyager-release-notes) 起,工具栏被组织为三个面向任务的 [**模式**](/zh-Hans/voyager/voyager-modes)。切换模式会保留您的数据——仅工具集会发生变化。
[ROI](/zh-Hans/voyager/voyager-region-of-interest)、[检查平面](/zh-Hans/voyager/voyager-inspection-planes)、[测量工具](/zh-Hans/voyager/voyager-measurement-tools)、[网格](/zh-Hans/voyager/voyager-mesh-tool)、[比较](/zh-Hans/voyager/voyager-cad-comparison) 以及完整的 Integrity Analysis 套件([孔隙率](/zh-Hans/voyager/voyager-porosity-analysis)、[夹杂物](/zh-Hans/voyager/voyager-inclusion-analysis)、[裂纹](/zh-Hans/voyager/voyager-crack-detection)、[壁厚](/zh-Hans/voyager/voyager-wall-thickness-analysis))。
基于自动特征提取构建的 [**3D 自动尺寸标注**](/zh-Hans/voyager/voyager-auto-dimensioning) GD\&T 套件——[直接尺寸](/zh-Hans/voyager/voyager-direct-dimensions)、[平面度](/zh-Hans/voyager/voyager-flatness)、[基准](/zh-Hans/voyager/voyager-datums) 和 [轮廓度](/zh-Hans/voyager/voyager-profile)。
用于共享关键视图并将 Project 转换为报告的 [书签](/zh-Hans/voyager/voyager-bookmarks)、[渲染](/zh-Hans/voyager/voyager-render-tool) 和 [动画](/zh-Hans/voyager/voyager-animation-tool)。
每个 Project 都从一个 [感兴趣区域 (ROI)](/zh-Hans/voyager/voyager-region-of-interest) 开始。ROI 可提高分辨率和对比度,将零件对齐到坐标系,并且 [尺寸标注模式](/zh-Hans/voyager/voyager-modes#dimensioning-mode) 中的每个工具都需要 ROI。
分析模式数据
在 [分析模式](/zh-Hans/voyager/voyager-modes#analysis-mode) 中,Project 编辑器将 Project 数据组织为以下类型,每种数据都呈现为一个数据对象:
* **Projections** — 扫描期间捕获的原始 X 射线照片
* **重建** — 从这些 Projections 重建出的完整 CT 体积
* **感兴趣区域 (ROI)** — 重建或另一个 ROI 的定向子体积
* **平面** — 支持 2D 测量的基于切片的视图
* **网格** — 由 [网格工具](/zh-Hans/voyager/voyager-mesh-tool) 生成或通过 [导入工具](/zh-Hans/voyager/voyager-import) 导入的表面表示
* **Analysis 结果** — 工作流程的输出(例如 CAD 比较、孔隙率、夹杂物、裂纹和壁厚)
尺寸标注模式数据
在 [尺寸标注模式](/zh-Hans/voyager/voyager-modes#dimensioning-mode) 中,[3D 自动尺寸标注](/zh-Hans/voyager/voyager-auto-dimensioning) 套件在定向 ROI 之上生成一组并行的、面向 GD\&T 的数据对象:
* **提取的特征** — 由 [自动特征提取](/zh-Hans/voyager/voyager-auto-dimensioning#automatic-feature-extraction) 生成的平面和圆柱;该模式中每个工具的输入
* **全零件网格** — 由 [轮廓度](/zh-Hans/voyager/voyager-profile) 使用的亚体素边界网格
* **导入的 CAD** — 通过 [导入工具](/zh-Hans/voyager/voyager-import) 加载用于轮廓度评估的 `.STEP` 名义几何;参见 [名义 CAD 导入](/zh-Hans/voyager/voyager-nominal-import)
* **基准** — 在提取的特征(或导入的 CAD)上构建的平面、轴和中分面参考
* **基准参考框架 (DRF)** — 跨越零件和导入的 CAD 的相关基准集合
* **直接尺寸** — 带公差和合格/不合格颜色编码的 [距离、角度和直径](/zh-Hans/voyager/voyager-direct-dimensions) 测量
* **GD\&T 评估** — [平面度](/zh-Hans/voyager/voyager-flatness) 和 [轮廓度](/zh-Hans/voyager/voyager-profile) 结果,以偏差热图形式显示,并附有考虑公差的标签
使用标准鼠标手势旋转、平移和缩放 3D 对象;使用 Viewport 下方的滑块在 2D 平面之间擦动。所有模式中的导航都相同。
除了三种模式之外,还有两组功能:
* [**Recipes**](/zh-Hans/recipes/recipes-intro) — 您组织可用的扫描和分析步骤的自动化、可重复序列。
* [**Labs**](/zh-Hans/voyager/voyager-labs) — 实验性应用,包括 [Data Quality Toolkit](/zh-Hans/voyager/voyager-labs-data-quality-toolkit)、[ROI Copy & Paste](/zh-Hans/voyager/voyager-labs-copy-paste) 和 [2D Dimensioning](/zh-Hans/voyager/voyager-labs-2d-dimensioning)。
请联系您的客户成功经理或发送电子邮件至 [customersuccess@lumafield.com](mailto:customersuccess@lumafield.com) 详细了解高级工具。
***
Voyager Dashboards
Voyager Dashboards 是 Voyager 的组织和管理层。
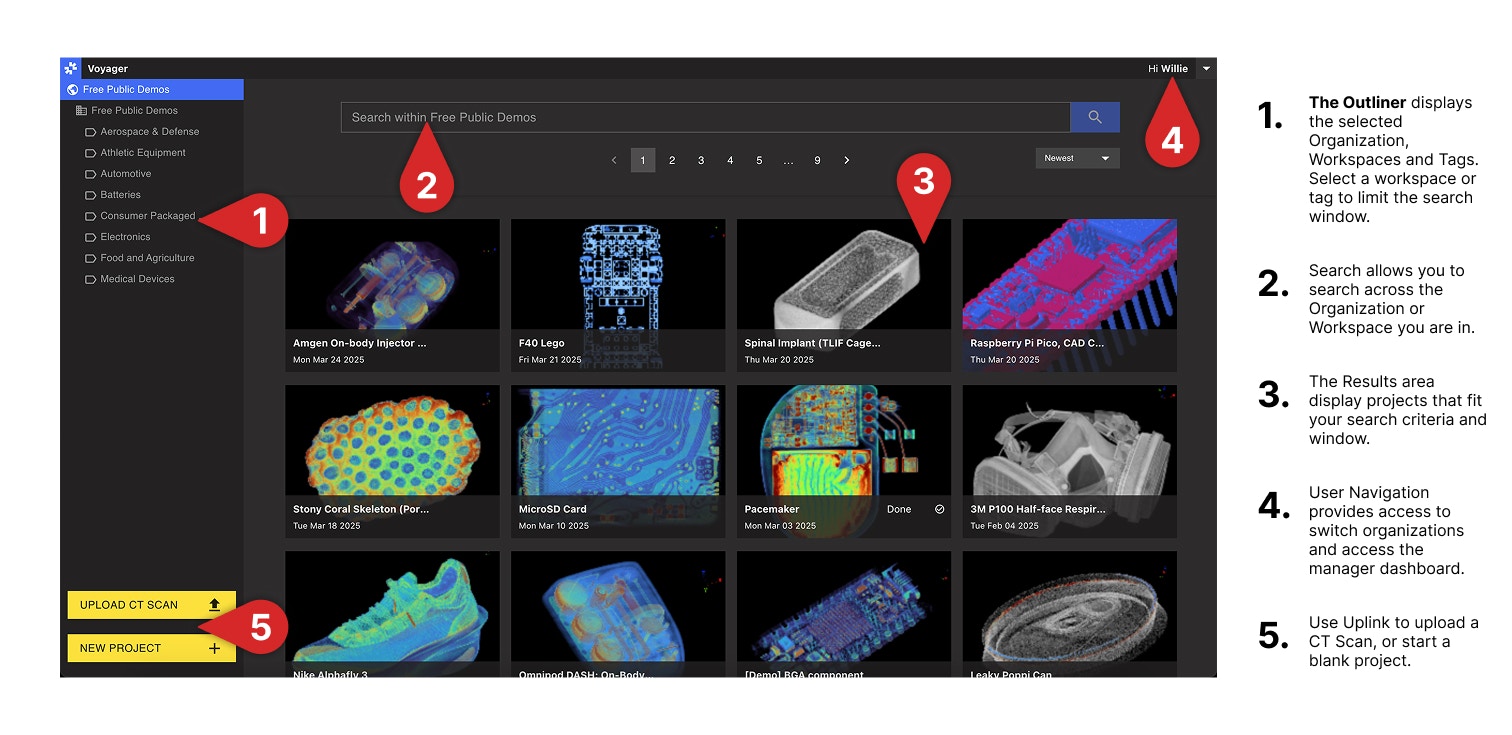 * [**Project Dashboard**](/zh-Hans/voyager/voyager-dashboard) 是所有 CT Projects 的中心位置,由已完成的扫描自动填充。使用**标签**和 [批量操作](/zh-Hans/voyager/voyager-dashboard) 进行大规模组织和搜索,并查看您组织的 **Workspaces**——分组相关 Projects 的访问边界。
* [**Manager Dashboard**](/zh-Hans/voyager/voyager-manager-dashboard) 提供用户管理、Workspace 创建、扫描仪访问和组织范围设置的控件。访问权限仅限于组织经理。
# Voyager 配置
Voyager 提供 **Cloud**、**GovCloud** 和 **On-Prem** 三种部署形态。
* **Voyager Cloud** 是 Lumafield 的标准托管部署,对受支持的硬件系统提供由 Lumafield 管理的 [软件版本](/zh-Hans/platform/voyager-release-notes)。
* **Voyager GovCloud** 为具有更高安全性和合规性要求的客户提供类似的部署模式。
* **Voyager On-Prem** 安装于您的环境中,软件版本通过 Lumafield 协调发布。服务器重启说明请参阅我们的 [On-Prem Power](https://support.lumafield.com/neptune/voyager-on-prem-power) 指南。
* [**Project Dashboard**](/zh-Hans/voyager/voyager-dashboard) 是所有 CT Projects 的中心位置,由已完成的扫描自动填充。使用**标签**和 [批量操作](/zh-Hans/voyager/voyager-dashboard) 进行大规模组织和搜索,并查看您组织的 **Workspaces**——分组相关 Projects 的访问边界。
* [**Manager Dashboard**](/zh-Hans/voyager/voyager-manager-dashboard) 提供用户管理、Workspace 创建、扫描仪访问和组织范围设置的控件。访问权限仅限于组织经理。
# Voyager 配置
Voyager 提供 **Cloud**、**GovCloud** 和 **On-Prem** 三种部署形态。
* **Voyager Cloud** 是 Lumafield 的标准托管部署,对受支持的硬件系统提供由 Lumafield 管理的 [软件版本](/zh-Hans/platform/voyager-release-notes)。
* **Voyager GovCloud** 为具有更高安全性和合规性要求的客户提供类似的部署模式。
* **Voyager On-Prem** 安装于您的环境中,软件版本通过 Lumafield 协调发布。服务器重启说明请参阅我们的 [On-Prem Power](https://support.lumafield.com/neptune/voyager-on-prem-power) 指南。