Positionnement des fondamentaux et sécurité
Un positionnement efficace de la pièce est un équilibre entre deux objectifs principaux :- Sécurité des objets : Prévenir la collision entre votre pièce et les composants du scanner
- Résolution optimiste : Assurer la qualité de l’analyse et la résolvabilité de votre objet ou domaine d’intérêt spécifique
Vérification manuelle
Le système Neptune n’utilise pas de capteurs de proximité pour prévenir automatiquement les collisions matérielles. Par conséquent, il incombe à l’exploitant d’assurer des voies de mouvement claires.Procédures d’urgence
Si vous observez une collision imminente ou tout mouvement inattendu pendant le positionnement:- Emergency Stop (E-Stop) : Appuyez sur le bouton Emergency Stop (E-Stop) rouge pour arrêter tout mouvement de gantry et d’étape. Reprendre le mouvement seulement une fois que vous avez vérifié que la partie a un chemin sûr de voyage
- Recommandation : Après un déclencheur E-Stop ou une collision matérielle physique, vous devez reloger le système. Ce processus recalibre tous les axes de mouvement, assurant que la précision de position du système est rétablie avant de reprendre le fonctionnement
- Appui aux contacts : Si un accident s’est produit ou si vous rencontrez un comportement de scanner anormal, e-mail support@lumafield.com immédiatement pour confirmer l’état de votre machine. Inclure des photos/videos de l’état actuel et une description de l’événement pour aider l’équipe d’ingénierie de Lumafield à vérifier l’intégrité du système avant de reprendre l’exploitation
Régler la position et l’agrandissement
Utilisez les curseurs tactiles, les touches fléchées ou l’entrée manuelle de valeur pour définir votre position de numérisation. Un alignement précis est la première étape vers la sécurité des données et du matériel de haute fidélité.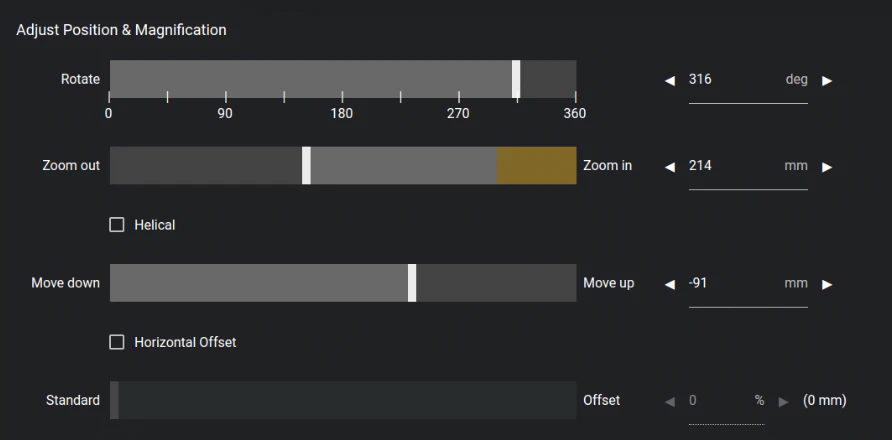
Contrôles de positionnement
Rote : Effectuez une rotation complète pour vérifier que votre pièce et tous les appareils de montage maintiennent un dégagement adéquat de la source de rayons X, de la roue de filtre et du détecteur.- Vérifier les limites : Utiliser “Vérifier les limites” pour une vérification rapide et automatisée et pour s’assurer que votre zone d’intérêt demeure dans le champ de vision (FOV)
Note : Si vous effectuez un balayage horizontal offset, Verify Bounds ne sera utilisé qu’en tant que vérification d’autorisation.
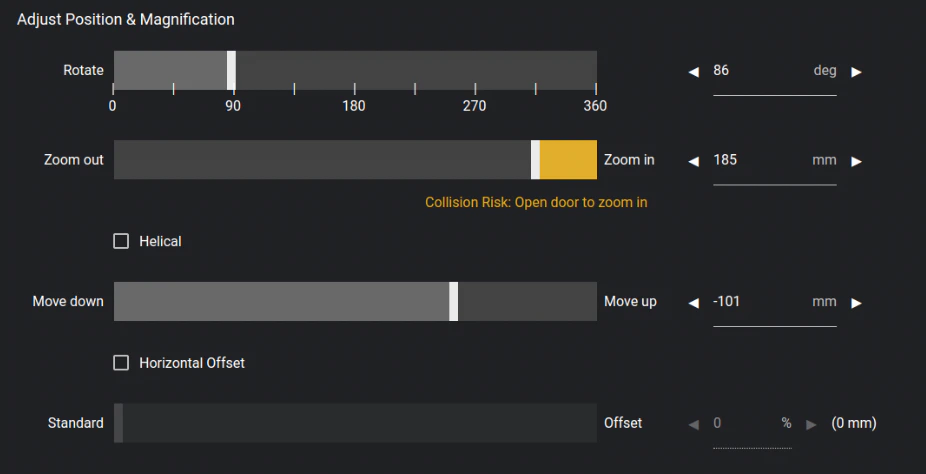
- La zone jaune : Cette zone mise en évidence indique un grossissement élevé et la proximité de la source. Lorsque vous travaillez dans cette région, faites preuve d’une extrême prudence
- Déplacement des roues du four : Assurez-vous toujours qu’il y a suffisamment d’espace physique pour que la roue filtre s’active et tourne sans frapper votre pièce ou votre montage
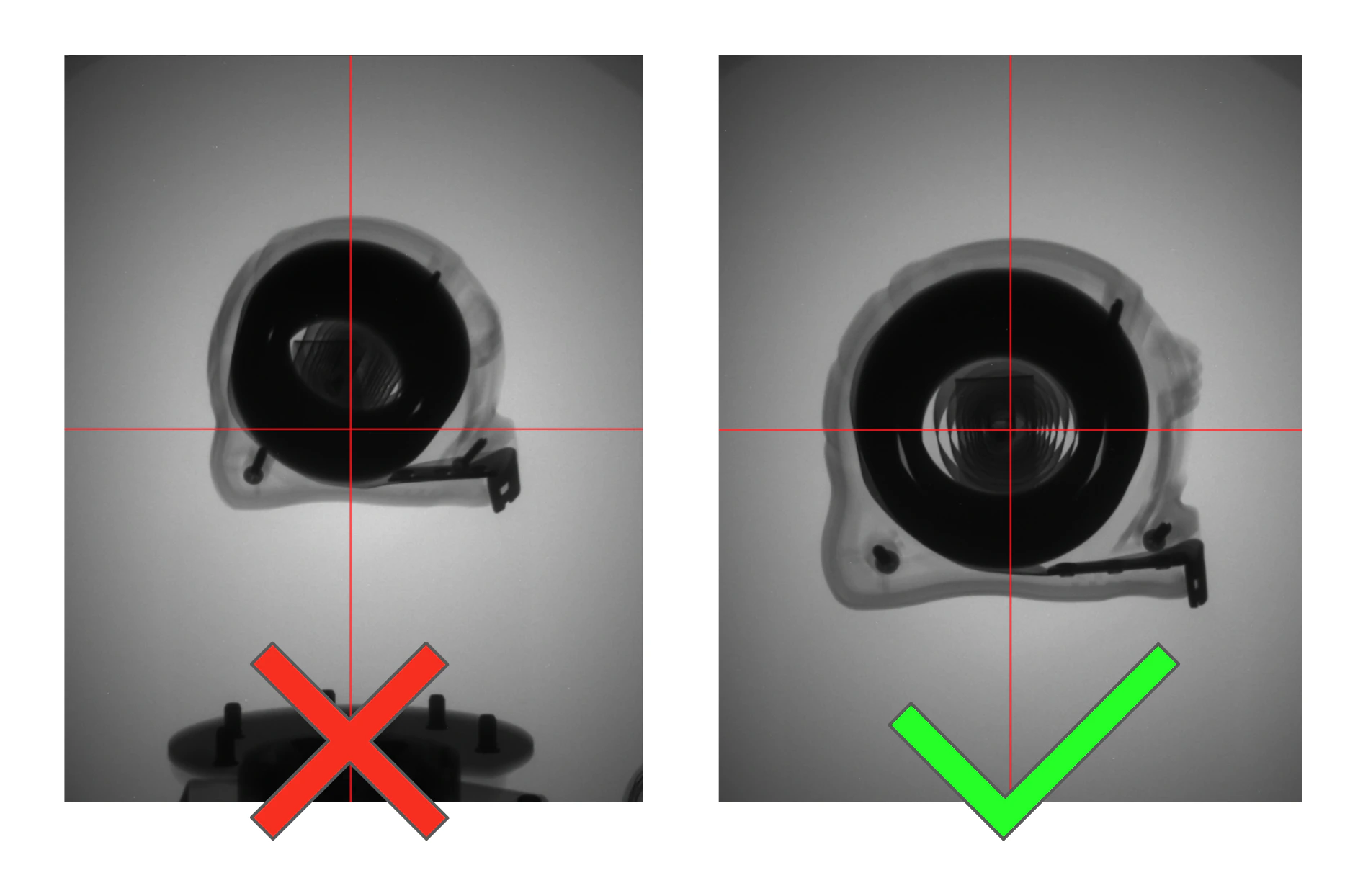
- Exposition optimale: Le centre de la FOV reçoit le flux de rayons X le plus élevé (intensité). Pour la meilleure qualité d’analyse, centrez verticalement votre partie ou les domaines d’intérêt
- Prévention des objets : S’assurer que le plateau tournant ou l’étape de mouvement n’est pas visible dans le FOV, car inclure le matériel de montage à haute densité peut introduire des artefacts indésirables
Grossissement préféré par modèle
En raison des différences de matériel, suivez ces lignes directrices pour une résolution optimale :- Naptune Standard & Neptune MFX: Placez la pièce aussi près de la source que possible. Sur ces modèles, la Jihlava est la plus grande résolution
- Haute puissance Neptune : Le grossissement idéal est ~2x ou de positionner la partie à peu près à mi-chemin entre la source et le détecteur. Pousser le grossissement plus haut sur ce modèle peut conduire à “blurring” en raison de la taille plus grande des points focals à des niveaux de puissance plus élevés
Modules de numérisation avancés
Selon la configuration de votre scanner, vous pouvez avoir accès à des modes d’acquisition spécialisés. Ces modules de numérisation utilisent des algorithmes de reconstruction avancés pour dépasser les limites physiques d’un volume de numérisation standard :- Scan offset horizontal (module de volume de balayage élargi) Utilisez ce mode pour doubler efficacement votre largeur de balayage, en augmentant le volume utilisable à presque deux fois l’enveloppe standard. En déplaçant l’axe de rotation et en permettant à l’objet de sortir intentionnellement du champ de vue (FOV) d’un côté, le logiciel utilise la reconstruction mathématique avancée pour « pointer » les données offset dans un seul volume surdimensionné.
- Scannage latéral (module de balayage horizontal) Utilisez ce mode pour étendre la hauteur de balayage vertical au-delà des limites du volume de balayage standard. En synchronisant le mouvement vertical continu de l’étage avec la rotation, le système offre une résolution uniforme sur toute la longueur de la pièce et minimise considérablement les artefacts de faisceaux de cônes sur les surfaces horizontales.
Pièces surdimensionnées et correction du champ plat (FFC)
Les images de correction de champ plat (FFC) sont des images de référence capturées par le détecteur d’un faisceau de rayons X non obstrué. Ces images établissent une base pour la sensibilité du détecteur et l’intensité du faisceau de rayons X, assurant une reconstruction sans artefact de haute qualité.- Initialisation et mise en cache : Les images FFC sont capturées pendant le processus de numérisation et mises en cache pendant 3 jours. Si un nouveau scan est exécuté avec les mêmes paramètres, l’étape FFC est ignorée et les images en cache sont utilisées. De nouvelles images FFC seront prises après l’expiration du cache
- L’exigence du “chemin clair” : Pour capturer un FFC valide, le chemin des rayons X vers le détecteur doit être complètement dégagé. Selon les paramètres de l’analyse, vous pouvez être invité à supprimer votre partie afin que le système puisse calibrer. Le système déplacera autrement votre partie du chemin vers une position FFC pour prendre ces images
- Le risque d’obstruction : Si une partie de votre objet (ou de vos installations) reste dans le chemin du faisceau pendant la capture d’images FFC, le système traitera cet objet comme une « ombre permanente ». Cela entraînera l’apparition d’artefacts tout au long de vos données de numérisation finales
Note : Si vous soupçonnez qu’une FFC mal capturée affecte votre qualité de balayage, veuillez communiquer avec : support@lumafield.com d’assistance.
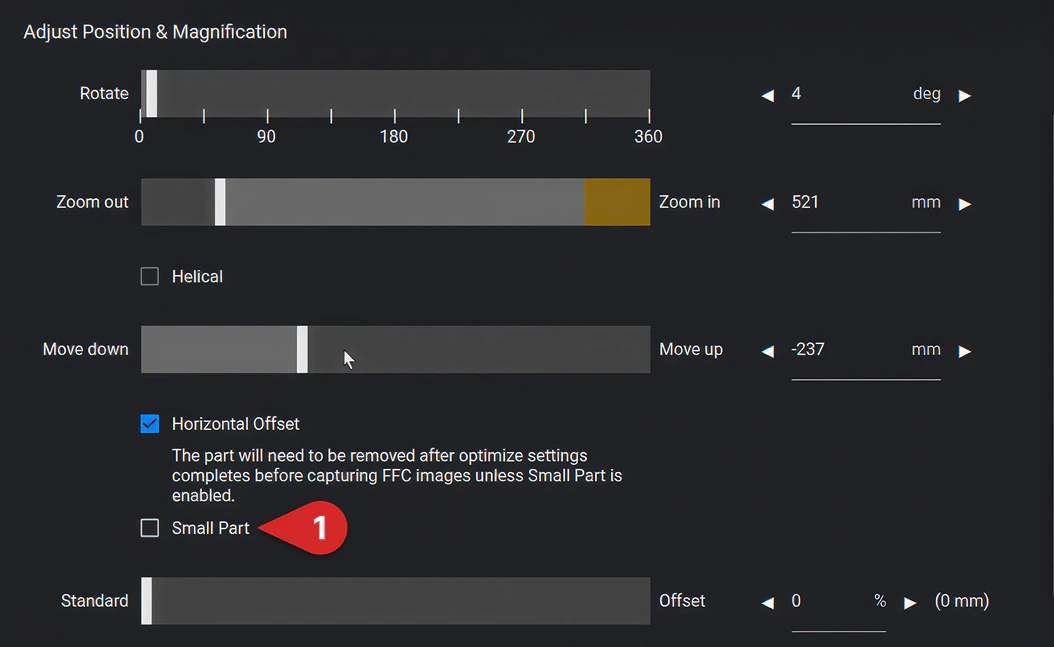
Boîte à cocher “Small Part” pour les balayages horizontaux offset
Lors de l’exécution d’un balayage horizontal offset, le système demandera la suppression manuelle des parties avant chaque balayage pour assurer un chemin clair pour les nouvelles images FFC. Si votre pièce est suffisamment petite physiquement pour que le système puisse obtenir une vue dégagée du détecteur en déplaçant l’étape vers la position FFC interne, vous pouvez sélectionner la case “Small Part” pour rationaliser votre workflow et contourner le besoin de supprimer manuellement votre pièce.