概要
Voyager は、Neptune と Triton で取得したデータを管理・検査・解析するための、Lumafield のクラウドベースソフトウェアです。X 線 CT が初めての方でも経験豊富な方でも、Voyager にはスキャンプロジェクトを整理し、再構成ボリュームをナビゲートし、ジオメトリを計測し、解析ワークフローを実行するための Tool が揃っています。 Voyager は主に 2 つのコンポーネントで構成されています。- CT データの可視化、計測、解析を行う Project Editor
- プロジェクトの整理、ワークスペース管理、管理設定を行う Dashboards
Voyager Project Editor
Project Editor は Lumafield の解析ソフトウェアで、CT スキャンデータと直接対話できます。データの作成・ナビゲーション、ジオメトリの計測、解析ワークフローの実行が行えます。レイアウトの詳細は Getting Around をご覧ください。
Voyager のモード
Voyager 2.0 より、Toolbar はタスクごとに最適化された 3 つの モード に整理されています。モードを切り替えてもデータは保持され、変わるのは Tool セットだけです。寸法測定モード(Dimensioning Mode)
自動特徴抽出を基盤とする 3D Auto-Dimensioning GD&T スイート — Direct Dimensions、平面度、データム、輪郭度。
解析モードのデータ
解析モード(Analysis Mode) では、Project Editor はプロジェクトデータを以下の種別に整理し、それぞれを Data Object としてレンダリングします。- Projections(投影) — スキャン中に取得した生の X 線ラジオグラフ
- Reconstruction(再構成) — それらの Projection から再構成された CT ボリューム全体
- 関心領域 (ROI) — 再構成または別の ROI から切り出した方向付きサブボリューム
- Plane(平面) — 2D 計測を可能にするスライスベースのビュー
- Mesh(メッシュ) — Mesh Tool で生成、または Import Tool でインポートしたサーフェス表現
- Analysis Results(解析結果) — ワークフローの出力(CAD 比較、ポロシティ、介在物、クラック、厚さなど)
寸法測定モードのデータ
寸法測定モード(Dimensioning Mode) では、3D Auto-Dimensioning スイートが、方向付き ROI の上に GD&T に特化した一連の Data Object を生成します。- 抽出フィーチャ(Extracted Features) — 自動特徴抽出(Automatic Feature Extraction) によって生成される平面と円柱。本モードのすべての Tool の入力となります。
- フルパートメッシュ(Full-part Mesh) — 輪郭度(Profile) で使用されるサブボクセル境界メッシュ
- インポートされた CAD — 輪郭度評価のために Import Tool で読み込んだ
.STEPノミナルジオメトリ。詳細は ノミナル CAD インポート を参照 - データム(Datum) — 抽出フィーチャ(またはインポートした CAD)上に作成する平面、軸、中心平面の参照
- データム参照系(DRF、Datum Reference Frame) — 部品とインポートした CAD にまたがる、相関付けられた一連のデータム
- Direct Dimensions — 公差と合否カラーコーディングを伴う 距離・角度・直径 計測
- GD&T 評価 — 平面度 と 輪郭度 の結果。偏差ヒートマップと公差に応じたラベルで表示されます。
高度なツール
3 つのモードと並行して、2 つの機能群が提供されています。- Recipes — Organization 向けに、スキャンと解析の手順を自動化・再現可能にした一連のステップ
- Labs — Data Quality Toolkit、ROI Copy & Paste、2D Dimensioning などの実験的アプリ
Voyager Dashboards
Voyager Dashboards は、Voyager の組織管理および管理者向けレイヤーです。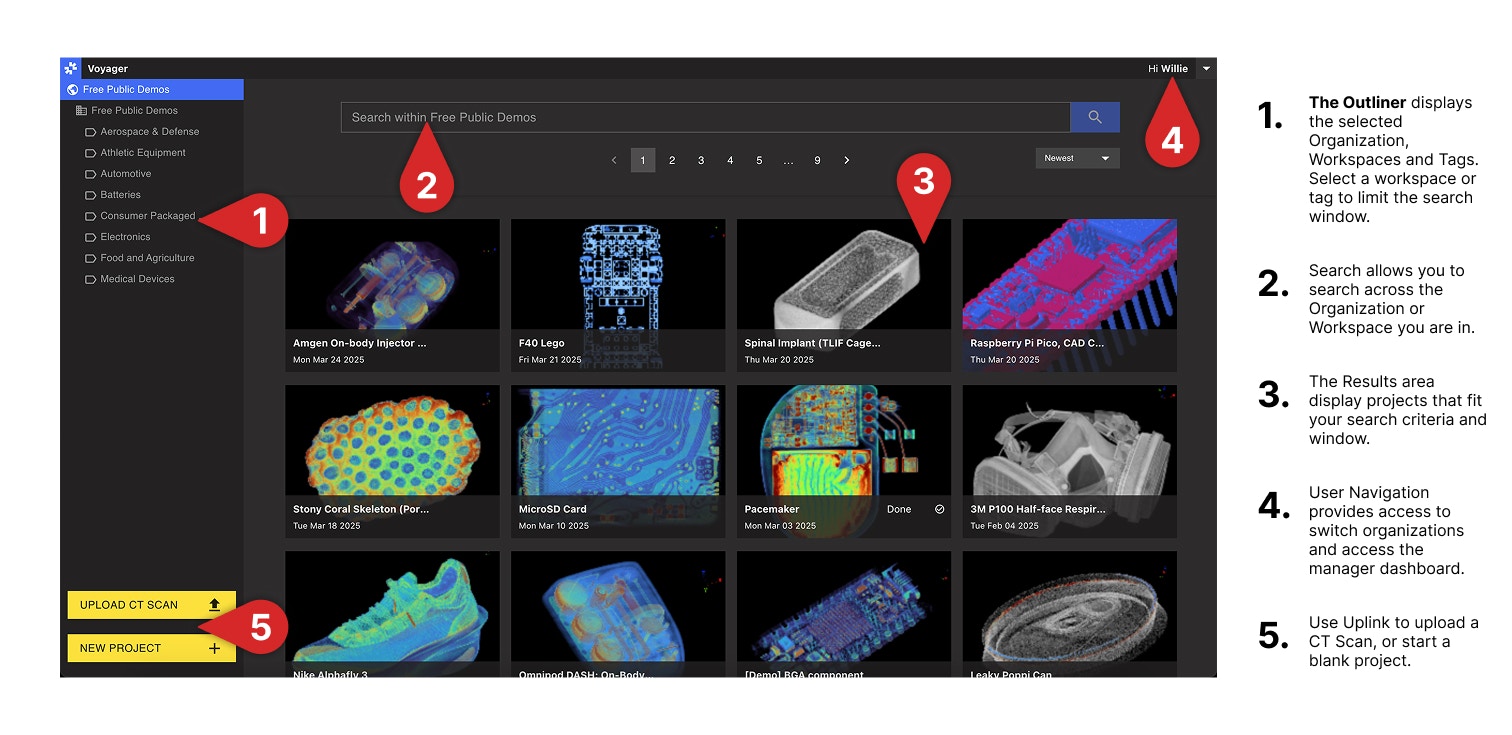
- Project Dashboard は CT プロジェクトの中心的な一覧で、完了したスキャンの結果が自動的に反映されます。Tags と Bulk Actions を使って大規模に整理・検索でき、関連プロジェクトをグループ化するアクセス境界である Organization の Workspaces も確認できます。
- Manager Dashboard では、ユーザー管理、ワークスペース作成、スキャナーアクセス、Organization 全体の設定を行えます。アクセスは Organization の管理者に限定されています。
Voyager の構成
Voyager は Cloud、GovCloud、On-Prem の 3 つの形態で提供されています。- Voyager Cloud は Lumafield の標準ホスティング型デプロイメントで、対応ハードウェアシステムに対して Lumafield が管理する ソフトウェアリリース が提供されます。
- Voyager GovCloud は、高度なセキュリティおよびコンプライアンス要件を持つお客様向けに、同様のデプロイメントモデルを提供します。
- Voyager On-Prem はお客様の環境内にインストールされ、ソフトウェアリリースは Lumafield との調整により行われます。サーバー再起動手順については On-Prem Power ガイドをご参照ください。